




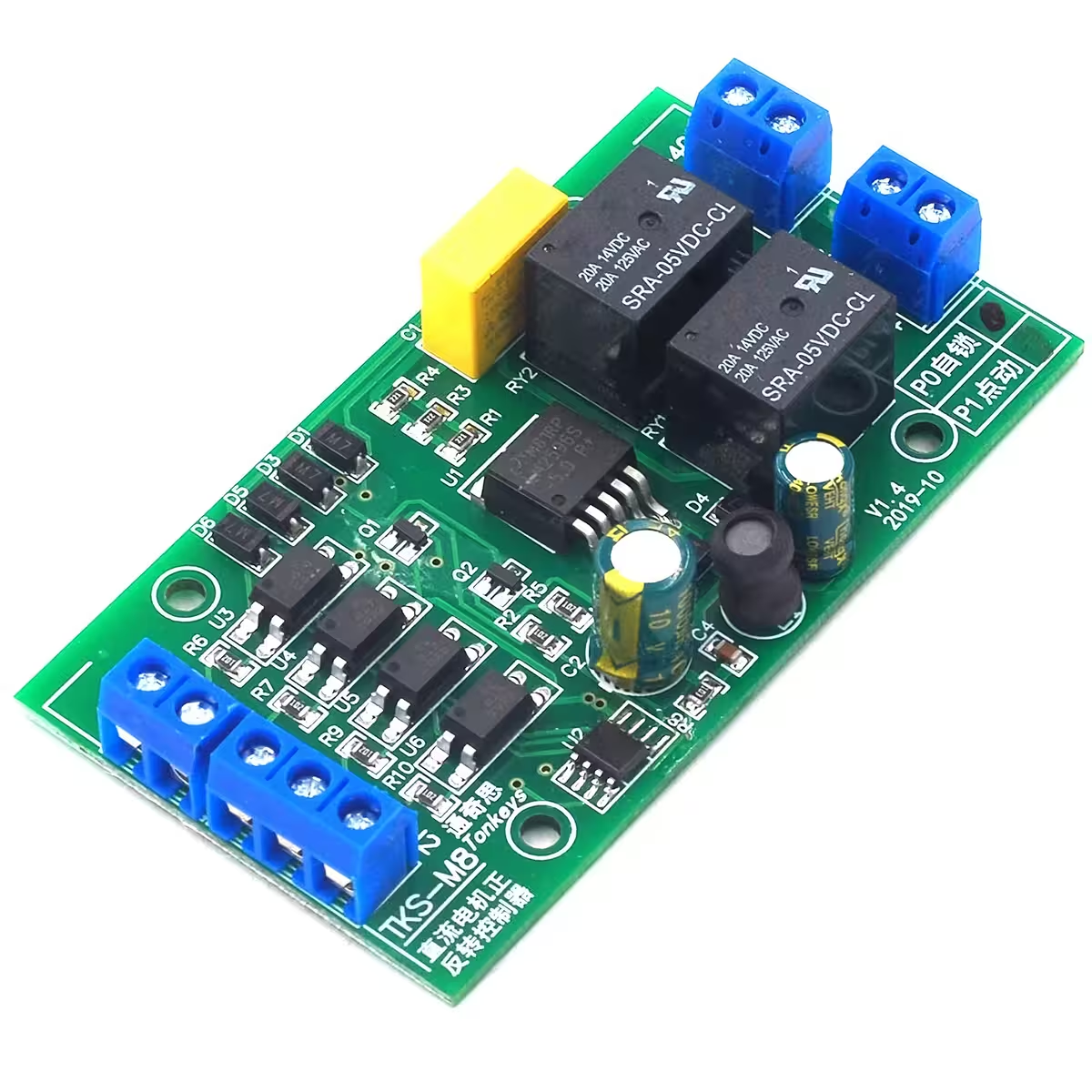
Krmilnik za smer vrtenja DC motorja – nadzor premikanja naprej/nazaj brez zunanjih komponent
Imate linearni aktuator, reverzibilni mehanizem ali DIY projekt, ki zahteva natančen nadzor smeri? Brez namenskega modula bi potrebovali releje, tranzistorje in zapleteno ožičenje. Ta krmilnik za DC motorje reši vse v enem samem kompaktnem modulu: povežete napajanje, motor in tipke – in sistem deluje v nekaj minutah.
Opomba: Motor prejema enako napetost, kot jo zagotavlja napajalnik. Napetost se preko tega krmilnika ne regulira.
Zakaj izbrati ta model? (Ključne prednosti):
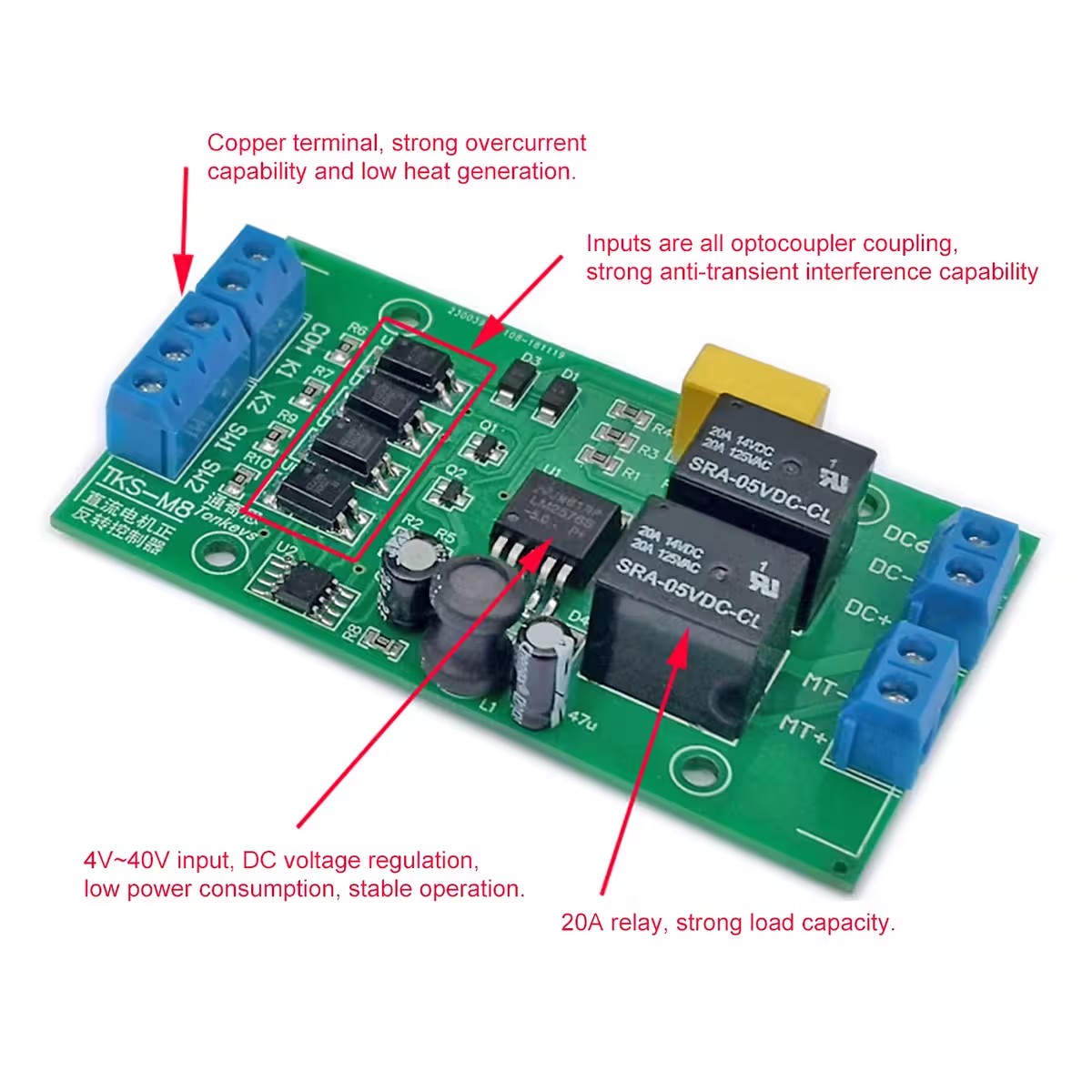
- Širok razpon napetosti: 4–40V DC — deluje z LiPo baterijami, laboratorijskimi napajalniki ali industrijskimi viri brez prilagoditev.
- Izhodni tok do 20A — obvladuje motorje z visokimi zagonskimi tokovi, primerno za obremenitve do ~80W.
- Dva načina delovanja: PO in P1 — izbirate med samodejnim ohranjanjem (zagon s kratkim impulzom) in »jog« načinom (deluje le, dokler držite tipko).
- Univerzalni »active-low« vhodi — neposredna povezava preprostih tipk, mehanskih NO končnih stikal ali 3-žičnih NPN senzorjev, brez dodatnih uporov ali logike.
- Vgrajena končna stikala SW1/SW2 — samodejna zaustavitev na koncu hoda preprečuje mehanske blokade ali preobremenitve.
- Življenjska doba >150.000 ciklov — zanesljivost za vsakodnevno uporabo.
- Nizka lastna poraba: 0,6W (aktivno) / 0,1W (stanje pripravljenosti) — minimalna obremenitev baterije v stanju mirovanja.
Podrobnosti in zmogljivost
Krmilnik uporablja arhitekturo active-low vhodov: vhod se aktivira, ko napetost na njem pade pod 2V. To pomeni, da lahko preproste tipke, NO (normalno odprta) mehanska stikala in NPN-NO 3-žične senzorje povežete neposredno, brez vmesnih komponent.
Odzivni čas je ≈20ms za ukaze K1/K2 in ≈50ms za končna stikala SW1/SW2 — dovolj hitro za dinamične aplikacije in dovolj stabilno, da preprečite lažne sprožitve.
Pri višjih napetostih se priporočeni tok zmanjša: pri 12V lahko uporabite do 20A, pri 24V pa priporočamo omejitev na ~10A za varno dolgoročno toplotno delovanje. Vedno uporabite ustrezno dimenzionirano varovalko in kable, primerne za obremenitev.
| Parameter | Vrednost / Podrobnost |
|---|---|
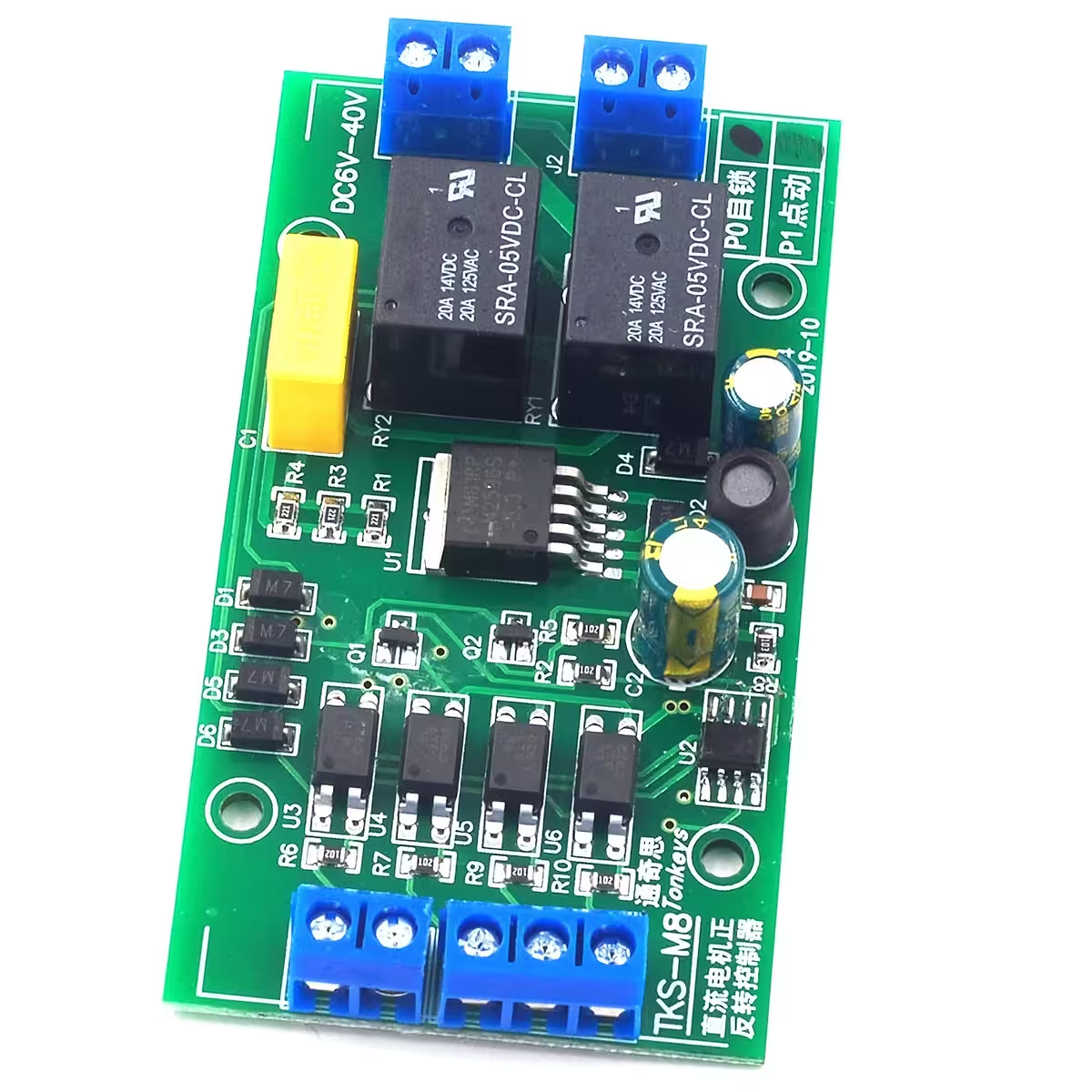
| Delovna napetost | DC 4–40V (priporočeno 6–36V) |
| Največji izhodni tok | do 20A (pri 12V) |
| Priporočena moč motorja | do ~80W |
| Poraba modula (aktivno) | pribl. 0,6W |
| Poraba modula (pripravljenost) | pribl. 0,1W |
| Tip vhodnega signala | Active-low (aktivno pri napetosti < 2V) |
| Odzivni čas K1/K2 | ≈ 20ms |
| Odzivni čas SW1/SW2 | ≈ 50ms |
| Načina delovanja | PO (samodejno) / P1 (jog) |
| Življenjska doba | >150.000 ciklov |
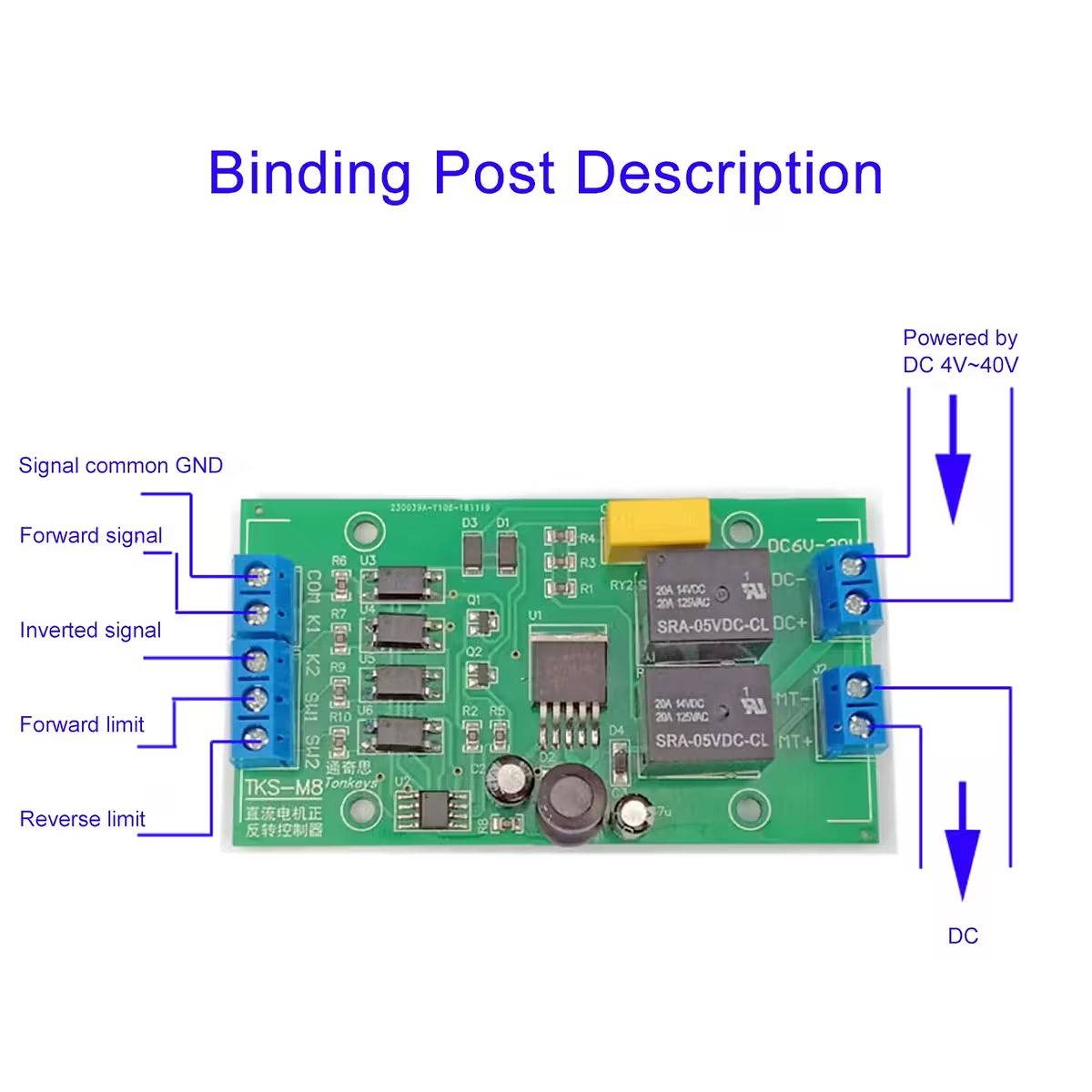
| Vhod K1 | Ukaz za smer naprej (active-low) |
| Vhod K2 | Ukaz za smer nazaj (active-low) |
| SW1 | Končno stikalo za smer naprej (priporočeno NO) |
| SW2 | Končno stikalo za smer nazaj (priporočeno NO) |
| VIN+ / VIN- | Napajanje modula DC 4–40V |
| Motor+ / Motor- | Izhod za DC motor |
Navodila za programiranje in uporabo
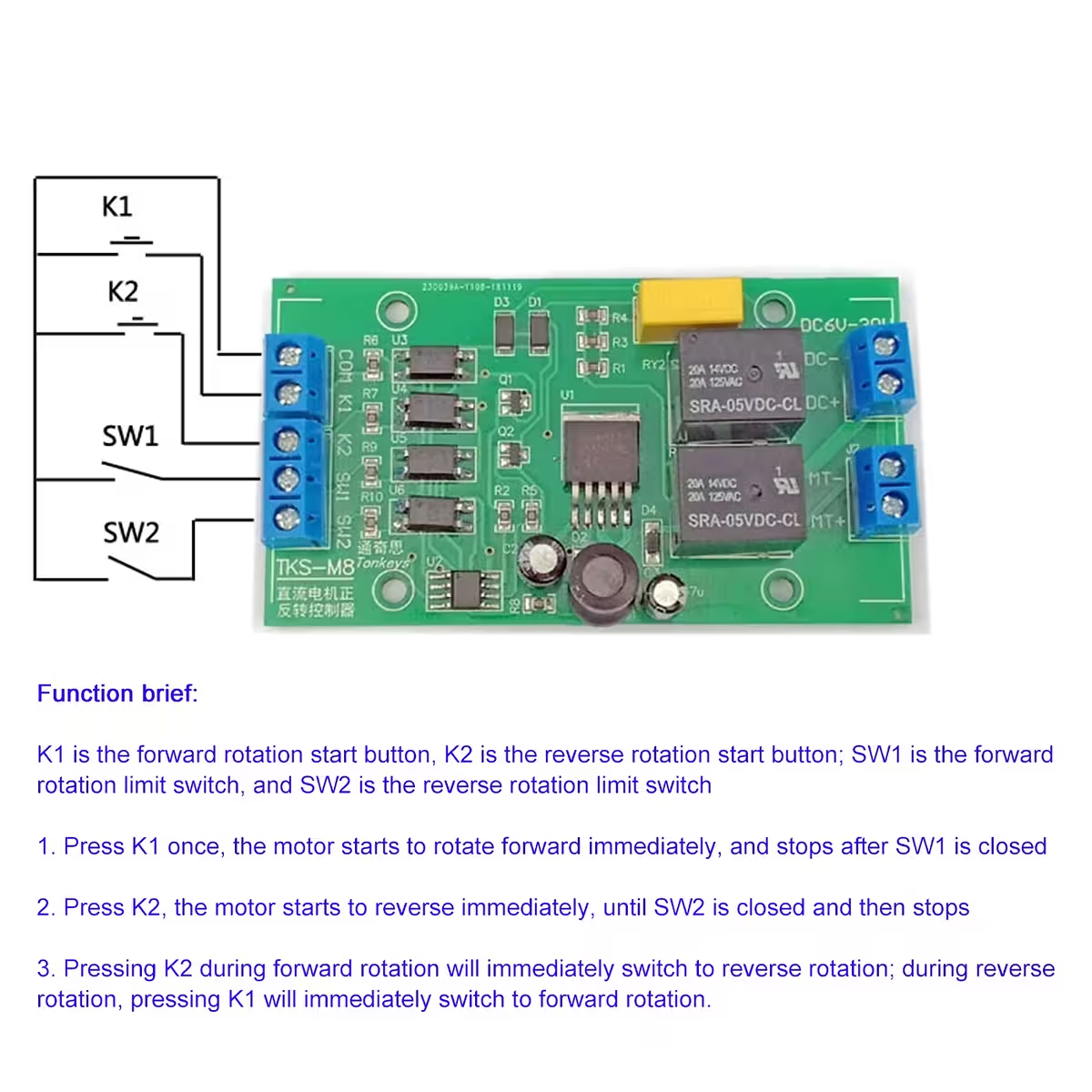
Način PO (Samodejno ohranjanje): Kratek impulz na K1 ali K2 zažene motor. Ta deluje samostojno, dokler se ne aktivira ustrezno končno stikalo ali dokler ne prejme nasprotnega ukaza. Idealno za avtomatizacijo.
Način P1 (Jog): Motor deluje le toliko časa, kolikor držite ukaz K1 ali K2 aktiven. Idealno za fino nastavljanje in ročno pozicioniranje.
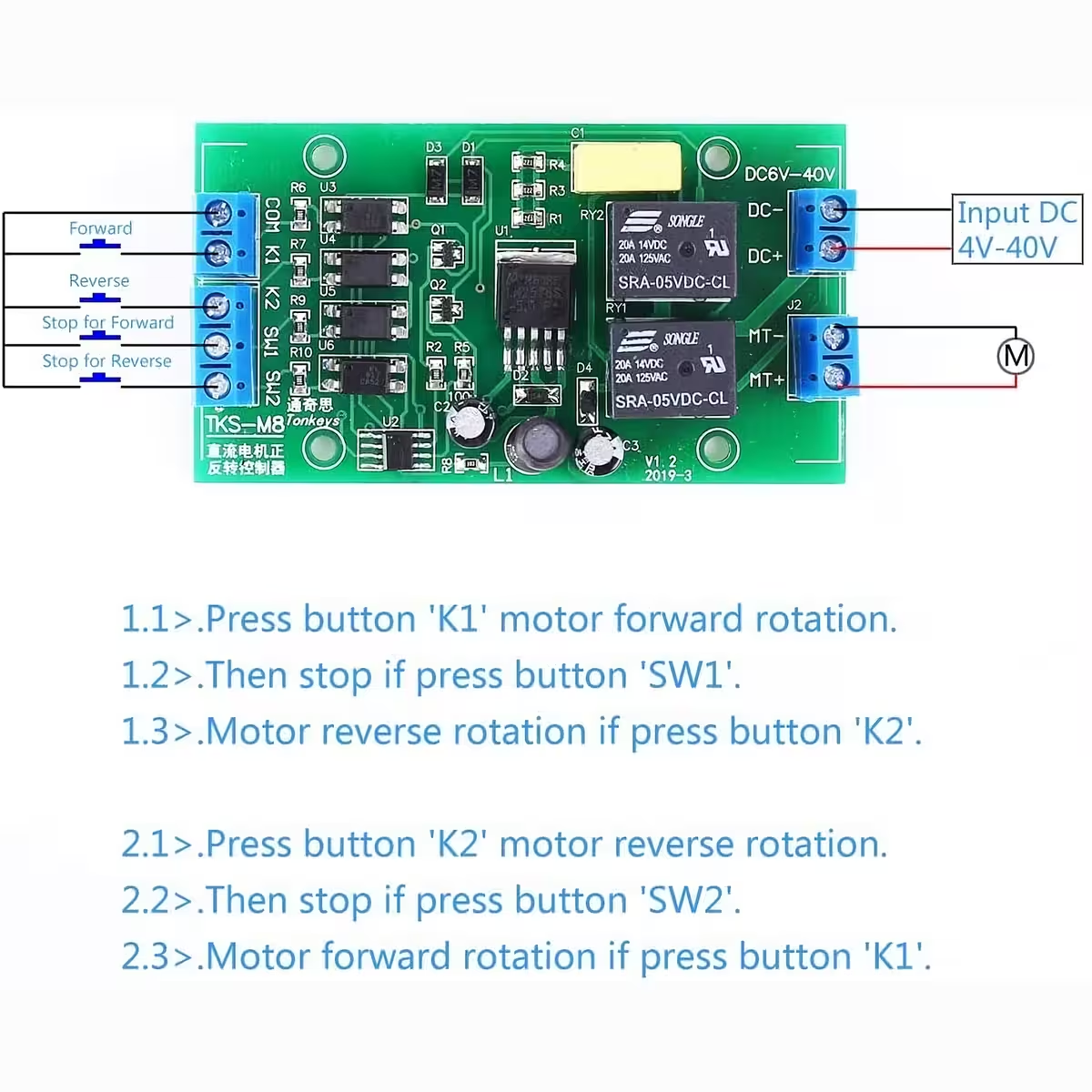
- Povežite napajanje na VIN+ in VIN– (upoštevajte polarnost).
- Povežite DC motor na Motor+ in Motor–.
- Izberite način delovanja: PO za samodejno ohranjanje ali P1 za jog.
- Povežite tipke ali krmilne signale na K1 (naprej) in K2 (nazaj) — vhodi so active-low.
- Po želji povežite mehanska končna stikala ali NPN-NO senzorje na SW1 in SW2.
- Za samodejno ciklično premikanje A→B→A: povežite izhode NO stikal s pozicije A na K1 in s pozicije B na K2, pri čemer pustite SW1/SW2 nepovezana.
- Za Arduino integracijo: povežite GND Arduina z GND krmilnika, digitalni pin za naprej na K1 in digitalni pin za nazaj na K2. Nastavite pina kot OUTPUT in za aktivacijo zapišite LOW.
- Preverite zagonski tok motorja in na napajalno linijo namestite ustrezno varovalko.
Vsebina paketa
- 1 × Krmilnik za smer DC motorja (Forward / Reverse), načina PO/P1
Pogosta vprašanja
Kaj pomeni active-low in zakaj je pomembno?
Vhod se aktivira, ko napetost na njem pade pod 2V — torej ko je povezan z maso (GND). Preproste tipke, NO mehanska stikala in NPN senzorji delujejo točno tako. Ne potrebujete dodatnih uporov ali inverzne logike.
Kakšna je razlika med načinoma PO in P1?
V načinu PO kratek impulz na K1 ali K2 zažene motor, ki deluje avtonomno do končnega stikala ali nasprotnega ukaza — uporabno za avtomatizacijo. V načinu P1 motor deluje le, dokler je ukaz aktiven — uporabno za natančne nastavitve ali ročni nadzor.
Ali lahko krmilnik povežem neposredno na Arduino?
Da. Povežite GND Arduina z GND krmilnika in uporabite dva digitalna pina, nastavljena kot OUTPUT. Ko je pin v stanju LOW, je ukaz aktiven. Arduino upravlja logiko, krmilnik pa moč — brez vmesnih komponent.
Ali lahko uporabim končna stikala z NC (normalno zaprtim) kontaktom?
Krmilnik je optimiziran za NO (normalno odprta) stikala. NC kontakti obrnejo logiko in lahko povzročijo neželeno delovanje. Za SW1 in SW2 vedno uporabite NO kontakte.
Ali potrebujem hladilnik pri največjem toku?
Pri tokovih blizu 20A ali pri intenzivnih ciklih zagotovite ustrezno prezračevanje in spremljajte temperaturo modula. Za neprekinjeno delovanje pri visoki obremenitvi lahko manjši hladilnik ali prisilno hlajenje znatno podaljšata življenjsko dobo.
Kako ustvarim samodejno ciklično premikanje brez časovnika?
Povežite NO stikali s pozicije A na K1 in s pozicije B na K2, pri čemer SW1 in SW2 pustite nepovezana. Ob dosegu vsakega konca hoda stikalo samodejno aktivira ukaz za nasprotno smer — motor bo nihal neprekinjeno brez zunanjega posega.
Predstavitveni video
Galerija slik











Mnenja
Zaenkrat še ni mnenj.